Note: In MTune 1.122 and newer, several input functions (if supported) can be controlled from several input pins/sources at the same time (logical OR if several pins are used).
Note: All digital inputs can be triggered using a Digital input (DINx), or by using the internal outputs.
Analog inputs.
MaxxECU has two different Analog inputs.
•TEMPERATURE - These inputs has a fixed 2.5k pullup resistor, best suitable for temperature sensors and switches.
•ANALOG INPUT (0-5V) - Has no fixed pullup, most suitable for pressure sensors. External 2.5k +5V pullup is required for temperature sensors.
Note, since MTune 1.149, AIN (TEMP) inputs can now be used as 0-5V inputs. Most pressure sensors will "most likely works", Potentiometer inputs will not work.
Samples times of AIN channels
•AIN 1-4 are sampled at 1kHz.
•AIN 5-12 are sampled at 100Hz.
•The rest at about 50Hz.
Note: BARO is sampled from internal MAP during power on, for any hillclimbing, please mount an external sensor.
Analog input X
Description
User-defined name for this input to easily identify what's connected.
use as
Specifies whether to use this input as a analog input, or a digital input to trigger digital input functions.
•Analog input - The input is used as a analog sensor (TEMP with fixed pullup, or 0-5V input).
•Digital input - The input is used to trigger digital input functions.
•CAN System user input 1- Used in some cases to control certain features in OEM CAN protocols.
•CAN system user input 2- Used in some cases to control certain features in OEM CAN protocols.
•Coolant Pressure - Must be calibrated in the pressure unit kPa.
•Coolant temperature sensor - Must be calibrated in deg C. Overrides the CLT input wire and uses this input as CLT instead.
•Crank case pressure - Must be calibrated in the pressure unit kPa.
•Clutch position - Must be calibrated in the 0-100 % range.
•Differential temperature - Differential temp sensor.
•E-throttle 1, position MAIN - Input from E-Throttle 1 position input 1 (main).
•E-throttle 1, position BACKUP - Input from E-Throttle 1 position input 2 (backup).
•E-throttle 2, position MAIN - Input from E-Throttle 2 position input 1 (main). <-- Only used if using dual E-Throttle bodies.
•E-throttle 2, position BACKUP - Input from E-Throttle 2 position input 2 (backup). <-- Only used if using dual E-Throttle bodies.
•E-throttle 1, pedal position MAIN - Input from E-pedal position input 1(main).
•E-throttle 1, PEDAL position backup - Input from E-pedal position input 2 (backup).
•EGT sensor 1 - Must be calibrated in deg C.
•EGT sensor 2 - Must be calibrated in deg C.
•EGT sensor 3 - Must be calibrated in deg C.
•EGT sensor 4 - Must be calibrated in deg C.
•EGT sensor 5 - Must be calibrated in deg C.
•EGT sensor 6 - Must be calibrated in deg C.
•EGT sensor 7 - Must be calibrated in deg C.
•EGT sensor 8 - Must be calibrated in deg C.
•EGT external cold junction temp sensor - Normally, the EGT Ref Temp (cold junction temperature) is continuously measured and compensated for by a PCB temperature sensor thermally coupled to the CMC connectors EGT pins, if this sensor class is used (and calibrated), it USES the EGT Ref Temp INSTEAD of the internal temp.
•Engine oil pressure - Must be calibrated in the pressure unit kPa. Used on some OEM CAN system to display custom oil pressure in instrument cluster.
•Engine oil temperature - Must be calibrated in deg C. Used on some OEM CAN system to display custom oil temperature in instrument cluster, or just used as a regular temperature sensor. If you have wired an oil temperature sensor to this input, select this.
•engine compartment temperature sensor - Must be calibrated in deg C. Mostly used on Porsche vehicles, when there is a engine compartment temperature sensor mounted.
•Ethanol % sensor (analog) - Must be calibrated in the 0-100 % range. Used with external ethanol sensor with an 0-5V output. (Do not use with the GM/Continental digital sensor).
•Exhaust backpressure post turbo - a pressure sensor mounted AFTER the turbo measuring pressure in the exhaust system. Must be calibrated in the pressure unit kPa.
•Exhaust backpressure - a pressure sensor mounted before the actual turbo, measureing exhaust pressures in the manifold. Must be calibrated in the pressure unit kPa.
•External BARO sensor - Must be calibrated in the pressure unit kPa. When enabled, MaxxECU uses this as BARO sensor instead of sampling the MAP sensor during power on.
•External map sensor - Must be calibrated in the pressure unit kPa. When enabled, MaxxECU internal MAP sensor is used as BARO sensor instead and the wired external MAP sensor is used as MAP instead.
•External map sensor, with BARO sampling - Must be calibrated in the pressure unit kPa. When enabled, the internal MAP sensor is ignored—both BARO and MAP are read from the external sensor.
•External map sensor CAM reference - Must be calibrated in the pressure unit kPa. When enabled the external MAP-sensor is used for the trigger system (sync) and the normal (internal) MAP-sensor is used for engine control.
•External map sensor,internal for CAM reference - Must be calibrated in the pressure unit kPa. When enabled the normal (internal) MAP-sensor is used for the engine control (sync) and the external MAP-sensor is used the engine control.
Note: Dual MAP sensors can be used on ITB engines where the sensor for the CAM reference is mounted in one of the intake runners, and the other sensor is mounted in a balancing tube or vacuum manifold. One sensor provides the vacuum pulse to sync the trigger system, and the other provides a stable vacuum signal for the fueling and ignition control.
•External wastegate pressure sensor - Must be calibrated in the pressure unit kPa. For usage with CO2 boost control.
•fuel level 1 - Must be calibrated in the 0-100 % range. Used on some OEM CAN system to display fuel level in instrument cluster.
•fuel level 2 - Must be calibrated in the 0-100 % range. Used on some OEM CAN system to display fuel level in instrument cluster.
•fuel TEMP - Must be calibrated in deg C.
•Fuel pressure sensor 1 - Must be calibrated in the pressure unit kPa.
•Fuel pressure sensor 2 - Must be calibrated in the pressure unit kPa.
Note: Dont forget to setup the accurate fuel pressure reference for the fuel pressure sensors.
•Gearbox Drivemode - Used to set certain gearbox drivemodes. 1.0 scale.
•Gear position sensor- 0-5V sensor to indicate the actual gear position on sequential gearboxes.
•intake temperature sensor - Must be calibrated in deg C. Overrides the IAT input wire and uses this input as IAT instead.
•lambda sensor bank A - Used when an external wideband sensor electronics is wired to an analog input, selection of lambda controller is done in Inputs --> Lambda sensor.
•Lambda sensor bank B - Used when an external wideband sensor electronics is wired to an analog input, selection of lambda controller is done in Inputs --> Lambda sensor.
•Lambda sensor bank C - Used when an external wideband sensor electronics is wired to an analog input, selection of lambda controller is done in Inputs --> Lambda sensor.
•Lambda sensor bank D - Used when an external wideband sensor electronics is wired to an analog input, selection of lambda controller is done in Inputs --> Lambda sensor.
•Lambda sensor bank E - Used when an external wideband sensor electronics is wired to an analog input, selection of lambda controller is done in Inputs --> Lambda sensor.
•Lambda sensor bank F - Used when an external wideband sensor electronics is wired to an analog input, selection of lambda controller is done in Inputs --> Lambda sensor.
•Lambda sensor bank G - Used when an external wideband sensor electronics is wired to an analog input, selection of lambda controller is done in Inputs --> Lambda sensor.
•Lambda sensor bank H - Used when an external wideband sensor electronics is wired to an analog input, selection of lambda controller is done in Inputs --> Lambda sensor.
•Throttle position sensor - Must be calibrated in the 0-100 % range.
•Transmission temperature - Must be calibrated in deg C. Transmission temp sensor.
•Tune selector - Can be used as any X or Y axis, or even as the 4D axle in any table to select different "tunes" in the whole system.
•wastegate position 1 sensor - Must be calibrated in the 0-100 % range.
•wastegate position 2 sensor - Must be calibrated in the 0-100 % range.
Note: Make sure to calibrate the sensor in the correct unit (metric) used by the system, especially if the sensors is used to control something, like fuel pressure, boost pressure, ac pressure etc.
Sensor
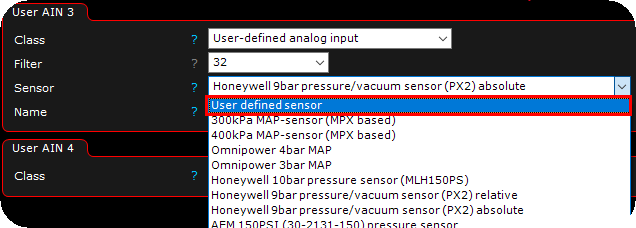
Specifies the sensor calibration on the actual input channel. Select a predefined sensor from the list, or select the User-defined sensor option to create your own calibration table.
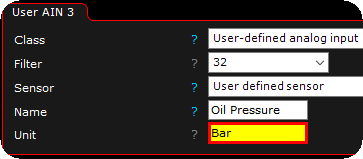
Unit
Specifies the unit of the sensor used, ex bar, psi, % etc (you can create your own units here if needed...)
Note: Only visible when the below Sensor calibration table is set to General purpose/no value conversion.
Sensor calibration table
Note: A general rule with MaxxECU is to calibrate all sensors using metric units, then it could be displayed localized. See MTune settings--> Displayed units.
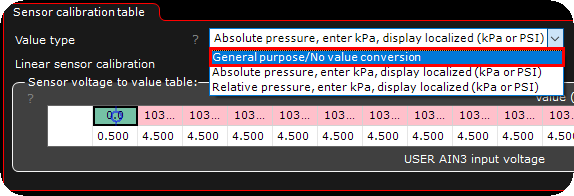
Value type
•General purpose/no value conversion.
•Absolute pressure, enter kpa, display localized (kPa or PSI). <-- "absolute pressure" which includes the atmospheric pressure.
•relative pressure, enter kpa, display localized (kPa or PSI). <-- "gauge pressure" will not pay attention to atmospheric pressure.
input settings
resolution
Specifies the sensor resolution on the selected input.
•1 (-32768 to +32767) - Values between -32768 and + 32767 can be used on the table (no decimals).
•0.1 (-3276.8 to +3276.7) - Values between -3276.8 and + 3276.7 can be used on the table (one decimal).
•0.01 (-327.68 to +327.67) - Values between -327.68 and + 327.67 can be used on the table (two decimals).
•0.001 (-32.768 to +32.767) - Values between -32.768 and + 32.767 can be used on the table (three decimals).
Note: When changing the resolution, any table value will be rescaled and changed accordingly and table min/max values will be used as stated above.
offset adjustment
Some sensors require a voltage offset. This may be due to atmospheric changes or unforeseen external changes. The zero output button can be used to adjust the offset value to accomplish a zero output.
Smoothing
A smoothing function reduces rapid fluctuations in a signal by blending current and past values. It can use averaging, weighted filtering, or low-pass algorithms to suppress noise and short spikes. The result is a more stable and predictable signal without significantly delaying normal signal changes.
Error detection
error detection
Whether to use error detection on the selection analog input channel or not. Default Disabled.
•disabled - No error detection.
•fail-safe value - Outputs a specified value when the system detects a failed sensor, based on user defined below/above thresholds.
•set error code - Set an error code for the selected analog input channel.
•fail-safe + set error code - Outputs a specified value when the system detects a failed sensor, based on user defined below/above thresholds and sets an error code.
Error below voltage
Specifies the minimum voltage threshold before trigger error detection (any voltage below this value, will trigger the error detection).
Error above voltage
Specifies the maximum voltage threshold before trigger error detection (any voltage above this value, will trigger the error detection).
Fail safe output value
Specifies the sensor output value to be used when an error has been detected on the input voltage, according to the min (below) and max(above) settings.
Examples
How to use AIN (temperature) as Analog 0-5V inputs using user tables.
Example - A predefined sensor exist in the list of sensors, but the sensor is in kPa and you want it to be displayed in BAR.
1. Select the sensor from the list
2. Add some filter to the sensor to get a smoother reading, and give the sensor a good name.
3. Select the User defined sensor from the dropdown list.
Note: When selecting the User defined sensor from the list, MTune copies the values from the last selected (and current) sensor calibration data and make it visible in the Sensor calibration table to be edited.
4. The sensor calibration is now visible, change the value type to General purpose/no value conversion.
5. After changed the above value type to General purpose/no value conversion, the unit is now visible, change it to suit your need (in this example Bar).
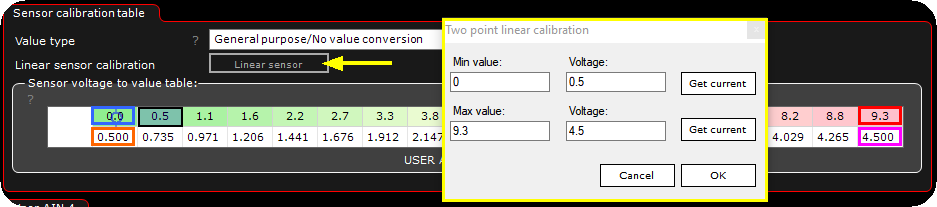
6. Change the calibration table to suit your sensor data.
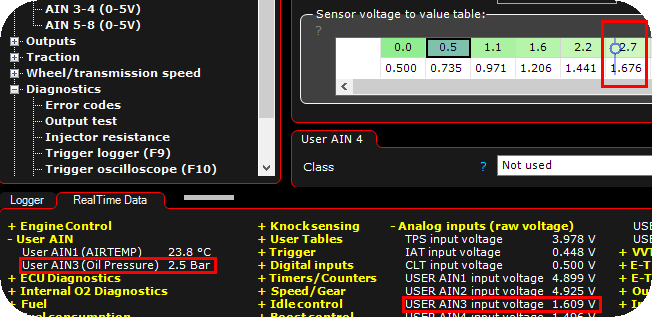
Blue box: Unit value to show at a minimum voltage (0 bar) from the sensor (orange box, 0.5V in the above example).
Red box: Unit value to show at a maximum voltage (9.3 bar) from the sensor (pink box, 4.5V in the above example).
Also, in the above example we used the "linear sensor" calibration button (yellow arrow) which will populate the calibration table with the settings you enter in the pop-up box seen above.
Note: Voltage threshold on AIN (0-5V) input is 3.00V when used as digital input.
Active level
Specifies whether function is active when voltage goes from high to low (falling edge) or low to high (rising edge).
Function
Specifies the digital input function to trigger when the input gets active.
Function 2
Specifies the digital input function to trigger as function 2 when using the below latch function.
latch
Adds a latching feature of the digital input, with possibility to trigger a secondary digital function.
•None (active while the input is active)
•Push: on, Push: off
•Push: on, long Push: off
•Push: on, long Push: function 2 on, push: both off
Pullup resistor
Specifies whether to use a pullup resistor on the input or not
•no pullup resistor - No pullup resistor us used on the input.
•pullup resistor enabled (2k5) - a 2500ohm resistor is connected to a +5V regulated source
Note: Not available on all inputs.
Note: You cannot use analog inputs for speed inputs like wheel speed, driveshaft speed, ethanol content sensor and similar. Such signals requires VR/DIN (digital) or PULSE inputs.